Definition3.1.1
Given an autonomous first order equation: \(y' = f(y)\text{,}\) the solutions of \(f(y)=0\) are called critical points of the equation.
Whenever the right hand side of a first order equation only involves the dependent variable, \begin{equation} \boxed{\dfrac{dy}{dx} = f(y).} \label{eqn-first-order-autonomous}\tag{3.1.1} \end{equation} then we can quickly determine the qualitative behavior of its solutions.
Recall from section 2.4 how a computer makes a slope field plot. It simply grids off the \(xy\)-plane and then at each vertex of the grid draws a short bar with slope corresponding to \(f(x_i, y_i)\text{,}\) however if the right hand side function is only a function of the dependent variable, \(y\) in this case, then the slope field does not depend on the independent variable, i.e. location on the \(x\)-axis. This means that for an autonomous equation, the slopes which lie on a horizontal line such as \(y=2\) are all equivalent and thus parallel.
This means that if a solution curve is shifted (translated) left or right along the \(x\)-axis, then this shifted curve will also be a solution curve, because it will still fit the slope field. We have established an important property of autonomous equations, namely translation invariance.
Consider the following autonomous differential equation: \begin{equation} \label{} y' = y(y-2). \label{eqn-autonomous-example}\tag{3.1.2} \end{equation} Notice that the two constant functions \(y(x)=0\text{,}\) and \(y(x)=2\) are solutions to equation (3.1.2). In fact any time you have an autonomous equation, any constant function which makes the right hand side of the equation zero will be a solution. This is because constant functions have derivative zero. Thus as long as this constant value of \(y\) is a root of the right hand side, then that particular constant function will satisfy the equation. Notice that other constant functions such as \(y(x)=1\) and \(y(x)=3\) are not solutions of equation (3.1.2), because \(y' = 1(1-2)=-1 \ne 0\) and \(y' = 3(3-2) = 1 \ne 0\) respectively.
Given an autonomous first order equation: \(y' = f(y)\text{,}\) the solutions of \(f(y)=0\) are called critical points of the equation.
So the critical points of equation (3.1.2) are \(0\) and \(2\text{.}\)
If \(c\) is a critical point of the autonomous first order equation \(y' = f(y)\text{,}\) then \(y(x) \equiv c\) is an equilibrium solution of the equation.
So the equilibrium solutions of equation (3.1.2), are \(y=0\) and \(y=2\text{.}\) Something in equilibrium, is something that has settled and does not change with time, i.e. is contant.
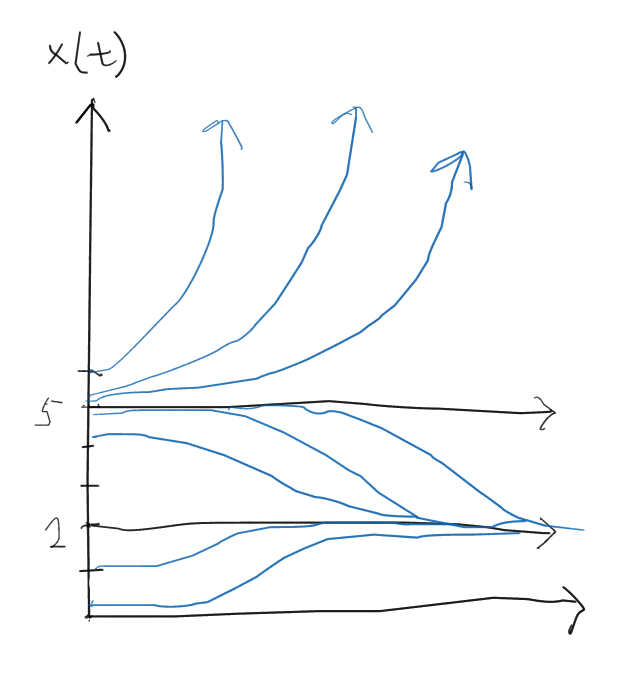
Create a phase diagram and plot several solution curves by hand for the differential equation: \begin{equation*} \frac{dx}{dt} = x^3 - 7x^2 + 10x \end{equation*}
We factor the right hand side to find the critical points and hence equilibrium solutions. \begin{align*} x^3 - 7x^2 + 10x \amp = 0\\ x(x^2 -7x + 10) \amp = 0\\ x(x-2)(x-5) \amp = 0 \end{align*} The critical points are \(0,2,5\text{,}\) and thus the equilibrium solutions are \(x=0, x=2\) and \(x=5\text{.}\)
Our earlier population model suffered from the fact that eventually the population would “blow up” and grow at unrealistic rates. This was due to the fact that the solution involved an exponential function. Recall the model and solution: \begin{equation*} \frac{dP}{dt} = kP, \: P(0)=P_0 \qquad P(t) = P_0 e^{kt}. \end{equation*}
Bacteria in a petri dish can't reproduce forever because they eventually run out of food and space. In our previous population model, the constant of proportionality was actually the birth rate minus the death rate: \(k = \beta - \delta\text{,}\) where \(k\) and therefore also \(\beta\) and \(\delta\) have units of 1/time.
To make our model more realistic, we need the birth rate to taper off as the population reaches a certain number or size. Perhaps the simplest way to accomplish this is to have it decrease linearly with population size. \begin{equation*} \beta(P) = \beta_0 - \beta_1 P \end{equation*} For this to make sense in the original equation, \(\beta_0\) must have units of 1/time, and \(\beta_1\) must have units of 1/(population\(\cdot\)time). Let's incorporate this new, decreasing birth rate into the original population model.
\begin{align*} \dfrac{dP}{dt} \amp = [(\beta_0 - \beta_1 P) - \delta]P\\ \amp = P[(\beta_0 - \delta) - \beta_1 P]\\ \amp= \beta_1 P \left[ \dfrac{\beta_0 - \delta}{\beta_1} - P \right] \end{align*}
In order to get a simple, easy to remember equation, let's let \(k = \beta_1\) and \(M = \frac{\beta_0 - \delta}{\beta_1}\text{.}\) \begin{equation} \boxed{\dfrac{dP}{dt} = k P ( M - P )} \label{eqn-logistic-model}\tag{3.1.3} \end{equation}
Notice that \(M\) has units of population. We have specifically written equation (3.1.3), in the form at the bottom of the derivation because \(M\) has a special meaning, it is the carrying capacity of the population.
Notice that equation (3.1.3) is autonomous, so we know how to go about solving it. However, before we solve the logistic model, let's refresh our memory of solving integrals via partial fractions, because we will need to use this when solving the logistic model. Let's solve a simplified version of the logistic model, with \(k=1\) and \(M=1\text{.}\)
In the exercises which follow, recall that my definition of a phase diagram is slightly different from that in your textbook. Given the autonomous DE \begin{equation*} x' = f(x) \end{equation*} I expect you to plot \(x'\) as a function of \(x\) and then decorate the \(x\)-axis with arrows corresponding to whether \(x'\) is positive or negative in that region.
Instructions for exercises 1-3: For each given autonomous DE, create a hand-drawn phase diagram (on \(x,x'\) coordinate axes). Use your phase diagram to help you hand-draw several representative solution curves on a set of \(t,x\) coordinate axes. Be sure to plot all equilibrium solutions. Recall that in any coordinate system, such as the \(x,y\) plane, the first variable corresponds with the horizontal axis.
\(\dfrac{dx}{dt} = 10x - x^2\) (logistic model)
\(\dfrac{dx}{dt} = x^2 - 10x\) (extinction-explosion model)
\(\dfrac{dx}{dt} = x^3 - 3x^2 - 13x + 15\)
Create phase diagrams for each of the following DEs: \begin{equation*} \frac{dx}{dt} = (x-a), \qquad \frac{dx}{dt} = (x-a)^2, \qquad \frac{dx}{dt} = (x-a)^3, \qquad \frac{dx}{dt} = (x-a)^4. \end{equation*} For each diagram, label the critical point as either stable, unstable or semi-stable. (Notice that the value of \(a\) is irrelevant. Not knowing whether \(a\) is positive, negative or zero just prevents you from placing zero on your \(x\)-axis.)
Create phase diagrams for each of the following DEs: \begin{equation*} \frac{dx}{dt} = (a-x), \qquad \frac{dx}{dt} = (a-x)^2, \qquad \frac{dx}{dt} = (a-x)^3, \qquad \frac{dx}{dt} = (a-x)^4. \end{equation*} For each diagram, label the critical point as either stable, unstable or semi-stable. (Again the value of \(a\) is irrelevant.)
Separate variables and use partial fraction decomposition to solve the logistic model IVP: \begin{equation*} \frac{dx}{dt} = 10x - x^2, \quad x(0)=1. \end{equation*} Use Sage to plot the solution against a slope field.
Starting with the logistic model IVP \begin{equation*} \frac{dP}{dt} = kP(M - P) \quad P(0)=P_0 \end{equation*} where \(k,M>0\text{,}\) separate variables and use partial fraction decomposition to derive the solution \begin{equation*} P(t) = \dfrac{MP_0}{P_0 + (M-P_0) e^{-kMt}}. \end{equation*}
Consider a population \(P(t)\) satisfying the logistic equation \begin{equation*} \frac{dP}{dt} = aP - bP^2, \end{equation*} where \(B = aP\) is the time rate at which births occur and \(D = bP^2\) is the rate at which deaths occur. If the initial population is \(P(0)=P_0\text{,}\) and \(B_0\) births per month and \(D_0\) deaths per month are occurring at time \(t=0\text{,}\) show that the limiting population is \(M = B_0 P_0 / D_0\text{.}\)
Consider a rabbit population which satisfies the logistic model as given in the previous exercise. If the initial population is 120 rabbits and there are 8 births per month and 6 deaths per month occurring at time \(t=0\text{,}\) how many months does it take for \(P\) to reach 95% of the limiting population \(M\text{?}\)
Consider a population \(P(t)\) satisfying the extinction-explosion equation \begin{equation*} \frac{dP}{dt} = aP^2 - bP, \end{equation*} where \(B=aP^2\) is the time rate at which births occur and \(D = bP\) is the rate at which deaths occur. If the initial population is \(P(0)=P_0\text{,}\) and \(B_0\) births per month and \(D_0\) deaths per month are occuring at time \(t=0\text{,}\) show that threshold population is \(M = D_0 P_0 / B_0\text{.}\)